

On s’imagine toujours les robots comme des êtres de métal, lourds, solides et rigides mais peu adaptés aux modifications de leur environnement.
L’un des principaux défis de la robotique consiste justement à changer cet état trop souvent pris pour acquis. Pour cela on peut recourir à des matériaux d’origine biologiques. C’est ce qu’ont fait des chercheurs du MIT en créant des mini-robots origamis faits d’intestions de porcs, de manière à ce que le corps humain puisse les ingérer sans les rejeter comme un corps étranger.
Publiés hier dans la revue Advanced Materials Technologies, les travaux d’une équipe de chercheurs pourraient bien révolutionner la façon dont ont été conçus les robots jusqu’à présent. Emmenées par le professeur George Whitesides, une équipe du Wyss Institute pour l’Ingénierie Bio-inspirée, que l’on connaît déjà pour ses nombreuses conceptions inspirées du règne animal, ces recherches ont pour mission de faciliter la coopération humain-robot en développant un nouveau type d’actuateur musculaire dénommé VAMPs (Vacuum-actuated muscle-inspired pneumatic structure). La robotique collaborative, communément appelée cobotique, est un champ de la recherche scientifique qui s’est considérablement développé ces dernières années. Avec la sortie de bras collaboratifs attentifs à leurs collègues humains, comme le robot Iiwa de Kuka, le tout nouveau Franka, ou bien encore le célèbre YuMi d’ABB Robotics, la robotique collaborative s’introduit progressivement dans nos usines.
Mais pour écarter tout risque de danger, ces constructeurs doivent équiper leurs robots d’un grand nombre de capteurs et d’axes pour s’assurer que le robot n’exerce pas de force excessive en cas de résistance. De ce fait, si le robot rencontre un obstacle, il s’arrête immédiatement. Certains attendent que la résistance disparaisse, d’autres nécessitent le redémarrage manuel du robot par souci de précaution. Mais investir dans de nombreux capteurs toujours plus performants revient très cher. C’est pourquoi le professeur Whitesides travaille sur de nouveaux matériaux et en particulier sur de nouveaux mécanismes musculaires pour les robots. Tant qu’à apporter tout un tas de technologies coûteuses, autant modifier la structure même du robot.
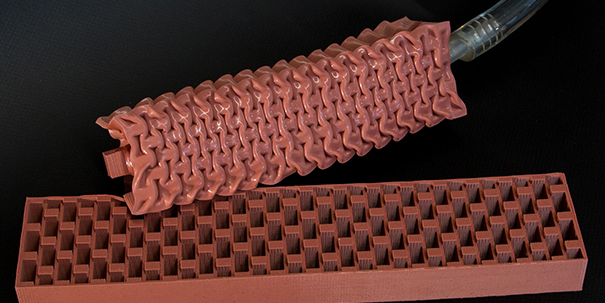
L’idée ? Générer du mouvement semblable à celui des muscles en utilisant l’énergie d’aspiration pour animer des bandes de caoutchouc. La reproduction artificielle de la mécanique des muscles biologiques est un casse-tête pour nombre de scientifiques, mais avec ce tout nouveau système de mouvement pneumatique, la barrière tombe.

Ce muscle artificiel fonctionne grâce au principe de pression inversée (vide). C’est à dire que le matériau, constitué d’élastomère, va générer de l’énergie et un mouvement en se contractant. “Très simplement, nos actuateurs copient le modèle du biceps humain” explique G. Whitesides, “d’autres actuateurs mous ont étés développés ailleurs, mais le nôtre est celui qui nous paraît le plus proche du muscle humain, en termes de temps de réponse et d’efficacité“. Les scientifiques qui ont pris part au projet ont adopté une approche tout à fait à contre-courant de ce qui se fait habituellement. Ils ont utilisé ce qui apparaît pour beaucoup être un défaut -la rétractibilité de l’élastomère- pour le tirer à leur avantage. Souvent considérée comme une propriété instable, l’élasticité est utilisée pour son côté étirable, et non pour sa contractibilité. A l’instar de nos muscles biologiques, l’actuateur VAMP se contracte pour générer de l’énergie, plutôt que de gonfler. Cette capacité le rend particulièrement intéressant pour être utilisé dans des espaces confinés, et donc pour la robotique de taille réduite.
La découverte représente un enjeu majeur pour la robotique qui devrait pouvoir tirer bénéfice des possibilités offertes par la souplesse de ces actuateurs novateurs. Car reproduire des muscles artificiels mous, c’est prévenir toute blessure sur l’humain qui collabore avec le robot. Mais c’est aussi solidifier le muscle artificiel en lui octroyant une capacité d’absorption des chocs. Elle ouvre donc de nouvelles perspectives à la robotique qui pourrait s’en servir pour améliorer la collaborativité des robots comme pour développer de nouveaux robots aux formes inédites. D’autant plus que les chercheurs ont démontré la fiabilité de leur invention. Même en cas de dégradation, avec un trou de 2mm, les structures VAMP se montrent toujours aussi efficaces. A cela, George Whitesides ajoute que “la structure ne peut tout simplement pas exploser et est donc intrinsèquement fiable“, dès lors qu’elle ne requiert aucune énergie potentiellement dangereuse pour l’Homme, comme l’électricité ou la combustion.
A Donald Ingber, Directeur du Wyss Institute, d’anticiper l’avenir d’une telle invention : “ces actuateurs bio-inspirés et auto-guérissants nous font avancer d’un grand pas dans la construction de robots à la structure entièrement souple”. Des robots qui pourraient “supprimer le fossé entre les robots et les hommes et proposer de nouvelles applications dans la médecine et bien au de-là”.
En attendant de voir cette technologie intégrer les robots, elle sera développée au sein de la société Soft Robotics, spin-off d’Harvard créée en 2013 et qui détient les droits de cette technologie révolutionnaire. Premier objectif ? Développer des mains de préhension pour travailler dans des environnements non structurés, comme les entrepôts de gestion de fruits et légumes, qui nécessitent une sensibilité particulière et ne sont pour l’instant pas ouverts aux robots.

Source : https://humanoides.fr/2016/06/le-muscle-artificiel-dharvard-invention-revolutionnaire-pour-la-robotique/

5 objets connectés pour retrouver le sommeil
Masque de nuit, réveil lumineux progressif, lunettes relaxantes… Les nouveaux marchands de sable sont 2.0. Nous avons voulu savoir si ces objets connectés nous permettent vraiment de lutter contre les difficultés d’endormissement, les réveils nocturnes et les insomnies chroniques.
lire plus
La réalité virtuelle au service de la santé
Quand on pense à la réalité virtuelle, on imagine un film ou bien un jeu vidéo. Mais la réalité virtuelle n'a pas pour unique but le divertissement. Elle a de nombreuses autres applications pratiques, notamment dans le domaine de la santé. Traitement des phobies, de la paraplégie ...
lire plus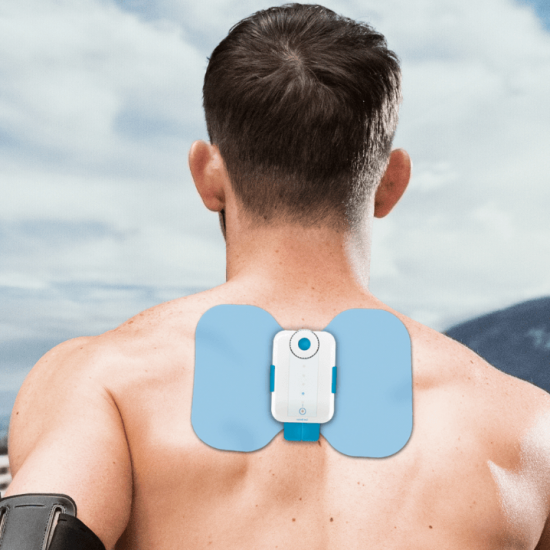
Bluetens : l’objet connecté sans fil pour le dos et ses maux
Bluetens est un objet connecté pour accompagner le travail de la kinésithérapie. Et il se décline désormais dans une version sans fil. Bluetens est une petite startup composée de professionnels de la santé et du sport, qui a dédié ses recherches à la création ...
lire plus
UN TATOUAGE DIGITAL POUR SAVOIR QUAND ON A TROP BU
Des ingénieurs californiens ont mis au point un tatouage permettant de tester son taux d'alcool avant de conduire.
lire plus